Fused imagers
Fused imagers (fusion multi-sensor imaging systems) offer increased surveillance capabilities due to fusion of classical thermal image with classical visible image. The fusion systems are typically built by combining optically images from thermal imager and classical night vision device, or by combining digitally images from thermal imager and digital night vision devices (or electronic VIS-NIR camera).

Test equipment is needed to check performance parameters of both channels of fused imagers. However, the most important task is to measure boresight errors between two channels needed for optimal fusion of two images. Information about boresight of fused imager can be presented in two main ways:
-
Set of alignment angles: a)the angle between optical axis of tested fused clip on working in two different modes: visible only and thermal imaging only, b)rotation angle between image from visible channel relative to image from thermal imaging channel,
-
Two dimensional map of spatial displacement of image from thermal imaging channel relative to image from the visible imaging channel (information how much and in which direction the pixel is displaced comparing to the same pixel in another channel).
The spatial displacement map enables more expanded correction of boresight errors but set of alignment errors is typicallyused to optimize image fusion. In case of clip on devices additional measurement of an angle between axis of incoming light beam and axis of output light beam emitted by the clip on (deviation of propagated light beam) is needed.
Inframet offers a series of systems for boresight and testing fused imagers
-
FUDIT station for testing and boresight of fused imagers,
-
FCLIP station for measurement of alignment errors of fused imaging clip ons,
-
FUT targets as a low cost solution for measurement of 2D image displacement map between images to be fused.
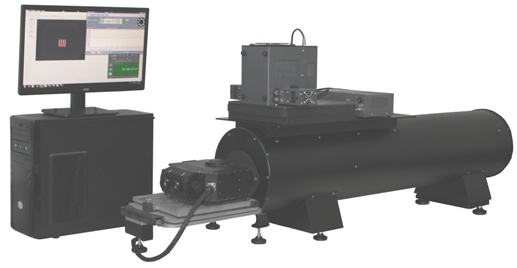 Fig. 1. FUDIT test system |
|
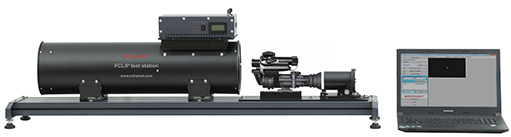 Fig.2. FCLIP boresight station |
 Fig.3. FUT fusion target |
Learn more :